Алгоритм составления плана (задание 28)
Задание 28 — составление плана развернутого ответа по конкретной теме обществоведческого курса.
При выполнении заданий данного типа выявляются умения: систематизировать и обобщать социальную информацию; устанавливать и отражать в структуре плана структурные, функциональные, иерархические и иные связи социальных объектов, явлений, процессов.
Пример задания 28 Вам поручено подготовить развёрнутый ответ по теме «Общественный прогресс». Составьте план, в соответствии с которым Вы будете освещать эту тему. План должен содержать не менее трёх пунктов, из которых два или
более детализированы в подпунктах.
Рассмотрим схему оценивания
|
Наличие любых двух из 2, 3 и 4 пунктов плана в данной или близкой по смыслу формулировке позволит раскрыть содержание этой темы, по существу. |
||
|
№ |
Критерии оценивания ответа на задание 28 |
Баллы |
|
28.1
|
1. Раскрытие темы 2 |
2 |
|
План содержит два пункта, наличие которых позволит раскрыть данную тему по существу. Один из этих пунктов детализирован в подпунктах |
|
|
|
План содержит один пункт, наличие которого позволит раскрыть данную тему по существу. Этот пункт детализирован в подпунктах. ИЛИ План содержит два пункта, наличие которых позволит раскрыть данную тему по существу. |
1 |
|
|
Все иные ситуации |
0 |
|
|
Указание по оцениванию: Если по критерию 28.1 (раскрытие темы), выставляется 0 баллов, то по всем остальным критериям оценивания выставляется 0 баллов |
||
|
28.2 |
2. Количество пунктов плана 1 |
1 |
|
Указание по оцениванию: Формулировки пунктов плана, имеющие абстрактно- формальный характер и не отражающие специфики темы, не засчитываются при оценивании |
||
|
Не менее трёх, два из которых детализированы в подпунктах |
1 |
|
|
Все иные ситуации |
0 |
|
|
28.
|
3. Корректность формулировок пунктов и подпунктов плана |
1 |
|
Формулировки пунктов и подпунктов плана не содержат ошибок и неточностей |
1 |
|
|
В формулировках пунктов и/или подпунктов плана содержатся неточности и/или ошибки |
0 |
|
|
Максимальный балл 4 |
||

 Ни один из этих пунктов не детализирован в подпунктах
Ни один из этих пунктов не детализирован в подпунктах 3
3
При выполнении такого типа задания нужно показать не только знания по заданной теме по существу, но и умение видеть проблему или тему целиком, различать ее структуру, возможные связи и соподчинения. Составить план- это значит представить или создать мысленно тот идеальный текст, который будет структурироваться и демонстрироваться в виде плана.
Универсальный алгоритм для составления плана
- Понятие, сущность…
- Характерные черты, основные принципы…
- Специфические признаки (отличительные особенности) …
- Задачи, основные функции…
- Формы, типы, виды, классификации…
- Структура…
- Основные этапы, стадии развития…
- Особенности развития…
- Тенденции развития в современном мире, в РФ…
- Значение … в развитии общества, личности….
Пример: «Общественный прогресс»
- Общественный прогресс – направленность совершающихся в обществе изменений
- Основные подходы к пониманию сущности общественного прогресса:
- Античные мыслители об умственном прогрессе
- Средневековое представление о прогрессе как необходимом условии достижения морального идеала (Царства Божия на земле)
- Эпоха Возрождения – понимание прогресса как усиление власти человека над природой
- Новое время – идея политического прогресса и его противоречивости
- ХХ – эволюционная теория прогресса
- Современное понимание прогресса
- Области общественного прогресса:
- Экономический прогресс
- Социальный прогресс
- Научно-технический прогресс
- Формы социального прогресса:
- Эволюционный (реформистский), т.
 е. постепенный
е. постепенный - Революционный т.е. скачкообразный
 е. постепенный
е. постепенный- Критерии общественного прогресса:
- Способность человечества противостоять саморазрушению (энтропии)
- Увеличение свободы человека, его способности к творчеству, самовыражению
- Степень реализации счастья как основного смысла человеческого существования
- Социально-экономический уровень жизни
- Противоречивость общественного прогресса
- Движущие силы и факторы, оказывающие влияние на общественный прогресс
- Гуманистические параметры – основные характеристики прогресса в современных условиях
Рекомендации:
- План должен охватывать основное содержание заданной темы (не пишите про трактора, если вас просят написать про ромашки…)
- В заголовках (в пунктах и подпунктах плана) нежелательно
- Не может быть пунктом плана ОПРЕДЕЛЕНИЕ и ВЫВОД (данные формулировки не дают возможность оценить ваши умственные способности…)
- Каждый последующий пункт плана должен быть связан с предыдущим (это опять про трактора…)
- Формулировки должны быть корректны с точки зрения обществознания и заданной темы (у вас вся жизнь впереди, чтобы насочинять свои собственные теории…)
- Структура плана обязательно должна быть сложной (т.е. у некоторых пунктов должны быть подпункты…а) б) в) или 1) 2) 3) … умение составлять сложный план – это учебные навыки 5-го класса)
- document Тренировочные задания на составление плана (28 KB)
 …)
…)
Составляем контент-план для Instagram — алгоритм и примеры
С тех пор как Инстаграм стал самой популярной площадкой среди жителей нашей страны, вести свой бизнес-профиль в соцсети стало обязательным.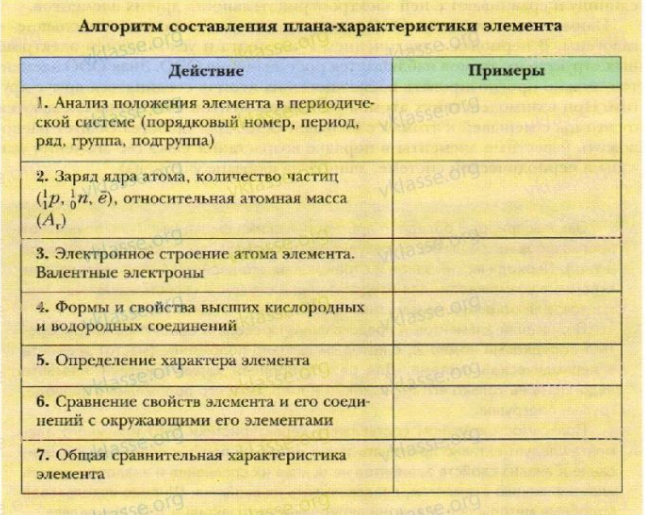 Бессистемно выкладывать посты не имеет смысла. Как минимум такая лента просто не принесет пользы. Как максимум – количество подписчиков уменьшится, а публика – станет неактивной. Оптимальное решение заключается в составлении контент-плана.
Бессистемно выкладывать посты не имеет смысла. Как минимум такая лента просто не принесет пользы. Как максимум – количество подписчиков уменьшится, а публика – станет неактивной. Оптимальное решение заключается в составлении контент-плана.
Что такое контент-план для Инстаграм
Даже новичок в Instagram-мире знает, что для продвижения бизнеса надо постоянно и регулярно что-то постить. Но если в начале ведения профиля идеи фонтанируют, то чем дальше, тем сложнее придумать, о чем написать. Специалисты по продвижению рекомендуют записывать все идеи в отдельный список и позже их прорабатывать. Вносить изменения, развивать тему, разветвлять ее на более мелкие посты. После такой обработки должно получиться подобие контент-плана.
Контент-план – это полезная схема или таблица, в которой указаны такие параметры для постов:
- дата;
- время размещения;
- площадка;
- направление публикации;
- картинка;
- текст;
- хэштеги;
- геотег.
Преимущества
Первое время составление плана отнимает много сил. Но уже после первого месяца использования заметны такие его достоинства:
- нет нехватки идей. Сотрудник, который ответственен за ведение соцсети, всегда знает, что и когда постить;
- можно заранее продумать, какие фото или видео будут нужны на следующей неделе;
- можно заранее дать техзадание подрядчику, который пишет тексты для соцсетей;
- доведение потенциальных клиентов-подписчиков до покупки с помощью грамотного сочетания продающих, информационных и развлекательных постов.
Если есть контент-план, гораздо легче фиксировать реакцию подписчиков на новые посты. Благодаря этому можно заранее корректировать план, выкладывая больше таких постов, которые интересны пользователям.
Еще одно преимущество контент-плана – когда тексты, фотографии заранее подготовлены, их можно занести в специальное приложение. Программа сама выложит пост в назначенный день и время. Тогда сотрудник, ответственный за постинг, может не переживать, что что-то забудет, не успеет. Так же профиль застрахован от технических неполадок: пост все равно попадет в сеть, даже если сломан телефон.
Тогда сотрудник, ответственный за постинг, может не переживать, что что-то забудет, не успеет. Так же профиль застрахован от технических неполадок: пост все равно попадет в сеть, даже если сломан телефон.
Алгоритм составления
Составление контент-плана необходимо начинать с подготовки таблицы. В нее будут занесены все данные. Уже после окончательного одобрения таблицы можно переносить посты в программу-автопостинг. Необходимы колонки, обозначающие дату и время, тип постов, площадку, заголовок, текст, фотография (видео), хэштеги и геотеги. «Продвинутые» пользователи могут добавить в таблицу дополнительные колонки – количество лайков, репостов, комментариев и сохранений. Эти блоки заполняются уже после того, как пост будет выложен и пройдет хотя бы пара дней.
Шаг 1. Типы постов
Для успешного профиля характерна комбинация из трех типов постов:
- продающие – в той или иной форме рекламирующие услугу и товар. Могут быть прямым обзором нового продукта, подборка отзывов, нативная реклама, анонсы акций. В посте обязательно указываются не только призывы к действию (пусть в неявной форме), но и конкретные данные – цена, условия доставки, ссылка на сайт с каталогом;
- информационные – освещающие процесс использования товаров, ремонт, обслуживание. Отлично подойдут инструкции, лайфхаки. Если у фирмы есть собственное производство, можно показывать «закулисье» бизнеса. Также в эту категорию можно отнести любые другие записи с полезной для клиента информацией;
- развлекательные – посты, не несущие серьезной смысловой нагрузки. Самый простой вариант – шутки и мемы по теме профиля. Можно напоминать читателям о праздниках, делать забавные подборки фильмов, книг по теме. Развлекательный контент формирует имидж компании, делает бизнес ближе к клиенту.
 В посте обязательно указываются не только призывы к действию (пусть в неявной форме), но и конкретные данные – цена, условия доставки, ссылка на сайт с каталогом;
В посте обязательно указываются не только призывы к действию (пусть в неявной форме), но и конкретные данные – цена, условия доставки, ссылка на сайт с каталогом;Наиболее удачным считается соотношение:
- продающие посты – 10–20 %;
- развлекательные посты – 30–40 %;
- информационные посты – 30–40 %.
Иногда для продвижения используется четвертый вид постов – вовлекающие. Их задача – стимулировать подписчиков сделать целевое действие. Например, поставить лайк, оставить любой комментарий, отметить друзей или сделать репост записи в сторис. Главная цель повышения активности заключается в увеличении охвата. Популярные записи алгоритм показывает большему количеству людей. Если вовлекающие посты используются, то на них отводится не более 30% в ущерб остальным видам.
Их задача – стимулировать подписчиков сделать целевое действие. Например, поставить лайк, оставить любой комментарий, отметить друзей или сделать репост записи в сторис. Главная цель повышения активности заключается в увеличении охвата. Популярные записи алгоритм показывает большему количеству людей. Если вовлекающие посты используются, то на них отводится не более 30% в ущерб остальным видам.
В таблице для контент-плана можно распределить разные типы записей примерно по очередности.
Шаг 2. Текст
После того, как было определено количество необходимых постов каждой разновидности, можно придумать конкретные темы и прописать к ним текст. Технические ограничения не позволяют уместить в описание более 2000 символов. Все, что не влезет в лимит, будет автоматически отрезано. Поэтому есть три варианта действий:
- писать только короткие посты до 2000 знаков;
- разбивать один длинный пост на несколько коротких – самый удобный с точки зрения планирования контента;
- «лишние» предложения выкладывать в карусель в виде скриншотов.
При написании постов важно учитывать следующие факторы:
- стиль общения с подписчиками – строгий деловой, нейтральный, неофициальный дружеский;
- броский заголовок – когда пользователь видит пост, ему доступны только первые 90 символов;
- темы, интересные целевой аудитории.
Тест должен быть разбит на абзацы, украшен смайлами (чтобы выделить акценты). Главная задача любого поста – заставить подписчика дочитать до конца.
Как только примерный список тем будет сформирован, текст для каждого написан, можно распределить посты между категориями. Затем каждая тема и текст заносятся в таблицу в соответствующую колонку.
Шаг 3. Хэштеги и геолокация
К каждому посту необходимо прописать хэштеги и геолокацию. На первый взгляд для этого не нужен контент-план. Однако именно планирование позволяет использовать больше тегов, чередовать их. Правила геолокации такие:
- если клиенты фирмы базируются только в одном регионе, то необходимо использовать разные популярные локации внутри региона – крупные города, улицы, бизнес-центры. Возможно, конкретные улицы, на которых работают клиенты;
- если есть доставка товаров и клиенты разбросаны по всей стране, то и в геолокации нужно прописывать по очереди все города.
 Возможно, конкретные улицы, на которых работают клиенты;
Возможно, конкретные улицы, на которых работают клиенты;Чтобы хэштеги работали на бизнес, необходимо использовать в одном посте до 20 тегов. Важно комбинировать разные тематические теги: высокочастотные, средне- и низкочастотные. Алгоритмы Инстаграм блокируют профили, которые всегда используют один набор хэштегов. Поэтому в процессе составления контент-плана необходимо отдельно выписать все допустимые хэштеги и затем поочередно использовать их.
Шаг 4. Подбор фото и видео
Для большинства пользователей Инстаграм до сих пор остается площадкой, где можно посмотреть красивые фотографии и интересные видео. Так как каждое фото – лицо бизнеса, необходимо при подборе или создании картинок следовать правилам:
- высокое разрешение кадров – как минимум HD;
- делать как можно больше фотографий и видео – всегда будет запас контента, из которого можно выбрать;
- максимум эмоций на фото. Если личные фотографии в бизнес-аккаунте неуместны, то можно использовать интересные ракурсы, необычные композиционные решения;
- использовать для фотографий хорошее освещение – даже если у компании пока нет дорогой профессиональной техники, хорошие условия съемки позволят сделать качественный кадр.
 Если личные фотографии в бизнес-аккаунте неуместны, то можно использовать интересные ракурсы, необычные композиционные решения;
Если личные фотографии в бизнес-аккаунте неуместны, то можно использовать интересные ракурсы, необычные композиционные решения;Чтобы профиль выглядел стильно и органично, можно использовать для всех кадров одну обработку или фильтр. Специалисты по продвижению советуют выстраивать порядок фотографий в соответствии с цветовой гаммой. Например, выбрать пару основные оттенков в ленте и пару акцентов. Для удобства можно использовать программу UNUM – она покажет, как будет выглядеть сетка, если в будущем размещать фото в том или ином порядке.
Шаг 5. Площадка
С тех пор как в Инстаграм появились сторис, предпочтения разделились: часть предпочитает привычные посты в ленте, но остальные просматривают в основном короткие сторис. Поэтому в контент-плане должны быть прописаны материалы для обеих площадок.
Стандартно считается следующая частота:
- сторис для бизнеса-аккаунтов – около 5 штук в день;
- посты для бизнес-аккаунта – около 1-2 постов каждый день.
Шаг 6. Когда и во сколько выкладывать
Универсального времени, когда нужно выкладывать посты, не существует. Оно определяется для каждого бизнеса индивидуально. Ориентироваться следует на целевую аудиторию. Если клиенты «разбросаны» по всей стране, то из-за разницы в часовых поясах сложно подобрать единое время, удобное всем. Нужно выкладывать пост тогда, когда это удобно большинству.
Необходимо составить портрет потенциального подписчика: пол, возраст, должность в компании-клиенте. На основе аватара клиента определяется, в какое время целевая аудитория может листать ленту. Средние значения такие:
- молодежь активна в вечернее время суток или ночью;
- сотрудники среднего возраста более активны днем во время обеденного перерыва.
Узнать о предпочтениях своей целевой аудитории можно с помощью статистики в Инстаграм. Для начала можно переключиться на бизнес-аккаунт. Там можно посмотреть, в какое время суток подписчики более вовлечены. Важно помнить, что в зависимости от дня недели время активности будет отличаться.
Для начала можно переключиться на бизнес-аккаунт. Там можно посмотреть, в какое время суток подписчики более вовлечены. Важно помнить, что в зависимости от дня недели время активности будет отличаться.
Программы для составления
Самый простой способ составить контент-план – создать таблицу в Excel или Google-сервисах. Там удобно редактировать план, добавлять дополнительные строки, акцентировать внимание на тех или иных постах с помощью цветовой заливки.
Но есть и более современные приложения, созданные специально для планирования записей в Instagram. Например, Trello представляет собой большую доску для стикеров с задачами. Среди преимуществ и возможностей сервиса:
- есть система напоминаний, чтобы пользователь не забыл создать и разместить пост;
- создания бизнес-команд;
- можно прикрепить картинки, видео или другие файлы;
- расставлять приоритеты с помощью цветовых отметок;
- перемещение задач в архив;
- наличие мобильного приложения.
Альтернатива – Amplifr. Приложение для создания контент-плана имеет встроенный календарь, так что пользователь никогда не пропустит время размещения публикации. Также программа позволяет анализировать количество лайков, подписок, репостов. Однако приложение платное: по 5 долларов в месяц. Первые две недели – пробный период.
Статья «Как правильно составить план-конспект урока» (алгоритм составления плана урока)
«Только тот учитель может стать подлинным мастером
своего дела, который хорошо изучит, что должны знать
ученики и каким путем добиться этих знаний».
В.А.Сухомлинский
Как правильно составить планконспект урока?
Общей функцией урока является целостное формирование и развитие личности
школьника на основе развивающего и воспитывающего обучения.
Ежедневное планирование занятий крайне необходимо для эффективного
воплощения в жизнь ваших замыслов. Составляя план урока, в первую очередь обращайте
внимание на цели, которые вы намереваетесь достичь. В произвольной форме составьте
список целей, решению которых будет посвящено занятие, и, основываясь на этих целях,
продумайте, какой материал и каким образом преподнести учащимся на уроке.
Планконспект урока – «альфа» и «омега» деятельности учителя. Подробный, развернутый
план поможет провести урок максимально результативно, сэкономит время и позволит
быстрее достичь поставленных целей. А четко выстроенная структура урока помогает
учителю удерживать внимание учащихся в течение всего урока.
Содержание уроков будет разным, в зависимости от предмета, от типа урока. Но основные
принципы составления грамотного конспекта во всех случаях одинаковы.
Этап 1. Тема урока
Тема урока всегда обозначена в рабочей программе учителя в разделе «Тематическое
планирование».
Этап II. Цели урока
Цель урока включает, с одной стороны, предвидение возможных результатов,
волю,
заложенных в данной ситуации учебновоспитательного процесса, а с другой, программу
действий учителя и учеников, направленную на получение желаемого результата.
В произвольной форме составьте
список целей, решению которых будет посвящено занятие, и, основываясь на этих целях,
продумайте, какой материал и каким образом преподнести учащимся на уроке.
Планконспект урока – «альфа» и «омега» деятельности учителя. Подробный, развернутый
план поможет провести урок максимально результативно, сэкономит время и позволит
быстрее достичь поставленных целей. А четко выстроенная структура урока помогает
учителю удерживать внимание учащихся в течение всего урока.
Содержание уроков будет разным, в зависимости от предмета, от типа урока. Но основные
принципы составления грамотного конспекта во всех случаях одинаковы.
Этап 1. Тема урока
Тема урока всегда обозначена в рабочей программе учителя в разделе «Тематическое
планирование».
Этап II. Цели урока
Цель урока включает, с одной стороны, предвидение возможных результатов,
волю,
заложенных в данной ситуации учебновоспитательного процесса, а с другой, программу
действий учителя и учеников, направленную на получение желаемого результата. «Кто не
знает, куда направляется, очень удивится, что попал не туда.» Марк Твен
Современная методика не требует разделения целей на обучающие, воспитательные и
развивающие. Но молодым учителям удобнее пользоваться старым, проверенным способом
и четко разграничить цели урока по трем позициям:
• Обучающие цели. Это могут быть такие цели, как:
дать представление о…;
обобщить и систематизировать знания о….;
познакомить учащихся с (понятием, правилом, фактами, законом и т.д.)
выработать навыки (например, анализа лирического текста).
• Воспитательные:
воспитывать в учащихся чувство патриотизма, гуманности, трудолюбия, уважения к
старшим, эстетический вкус, этические нормы, дисциплинированность…
• Развивающие. Здесь указываются цели, которые помогут развивать у учащихся память,
фантазию,
самостоятельность,
коммуникативность. Если в уроке предусмотрены групповые виды работы, то можно
указать, что главной развивающей целью будет учить работать в команде, высказывать и
отстаивать свою точку зрения, развивать коммуникативные навыки.
«Кто не
знает, куда направляется, очень удивится, что попал не туда.» Марк Твен
Современная методика не требует разделения целей на обучающие, воспитательные и
развивающие. Но молодым учителям удобнее пользоваться старым, проверенным способом
и четко разграничить цели урока по трем позициям:
• Обучающие цели. Это могут быть такие цели, как:
дать представление о…;
обобщить и систематизировать знания о….;
познакомить учащихся с (понятием, правилом, фактами, законом и т.д.)
выработать навыки (например, анализа лирического текста).
• Воспитательные:
воспитывать в учащихся чувство патриотизма, гуманности, трудолюбия, уважения к
старшим, эстетический вкус, этические нормы, дисциплинированность…
• Развивающие. Здесь указываются цели, которые помогут развивать у учащихся память,
фантазию,
самостоятельность,
коммуникативность. Если в уроке предусмотрены групповые виды работы, то можно
указать, что главной развивающей целью будет учить работать в команде, высказывать и
отстаивать свою точку зрения, развивать коммуникативные навыки. Этап III. Планируемые задачи
Здесь обозначается минимум тех знаний и умений, которые должны приобрести учащихся
во время урока. Планируемые задачи стоит сопоставлять с требованиями к знаниям и
умениям учащихся, которые обозначены Министерством Образования для каждого класса
и для каждого предмета по ФК ГОС и по ФГОС
познавательное умение,
мышление, Этап IV. Вид и форма урока
В плане их можно и не указывать, но для себя каждый раз стоит уточнять, будет это урок
объяснение,
урокбеседа или вы нацелены провести нестандартный урок.
Для удобства приведем примеры самых распространенных видов и форм урока.
Виды и формы урока
1. Урок ознакомления с новым материалом.
Формы: беседа, проблемный урок, лекция.
2. Урок закрепления изученного.
Формы: игры, конкурсы, КВН, путешествие, бенефис, аукцион, сказка, брифинг, спектакль
и т.д.
3. Урок применения новых знаний и умений на практике.
Формы: те же, что и для уроков закрепления. Можно также проводить уроки
исследования, лабораторные, практические работы, творческие мастерские, соревнования,
тестирование, экскурсии и т.
Этап III. Планируемые задачи
Здесь обозначается минимум тех знаний и умений, которые должны приобрести учащихся
во время урока. Планируемые задачи стоит сопоставлять с требованиями к знаниям и
умениям учащихся, которые обозначены Министерством Образования для каждого класса
и для каждого предмета по ФК ГОС и по ФГОС
познавательное умение,
мышление, Этап IV. Вид и форма урока
В плане их можно и не указывать, но для себя каждый раз стоит уточнять, будет это урок
объяснение,
урокбеседа или вы нацелены провести нестандартный урок.
Для удобства приведем примеры самых распространенных видов и форм урока.
Виды и формы урока
1. Урок ознакомления с новым материалом.
Формы: беседа, проблемный урок, лекция.
2. Урок закрепления изученного.
Формы: игры, конкурсы, КВН, путешествие, бенефис, аукцион, сказка, брифинг, спектакль
и т.д.
3. Урок применения новых знаний и умений на практике.
Формы: те же, что и для уроков закрепления. Можно также проводить уроки
исследования, лабораторные, практические работы, творческие мастерские, соревнования,
тестирование, экскурсии и т. д.
4. Урок обобщения и систематизации знаний.
Форма выбирается свободная, по желанию учителя.
5. Контрольный урок.
Формы: как традиционные контрольные работы, зачеты, диктанты, сочинения, так и более
творческие виды: семинары, брифинги или консультации.
6. Интегрированные уроки. Формы свободные, так как задействованы 2 и более предметов
в одном уроке.
Этап V. Оборудование
Здесь перечисляется все, что будет использовать учитель в ходе урока. Это
мультимедийные презентации, репродукции картин, аудио и видео материалы, наглядные и
раздаточные материалы.
Этап VI. Ход урока
1.
сконцентрировать внимание учащихся, определить их собранность и готовность к уроку.
2. Проверка домашнего задания. Опытные педагоги практикуют ежеурочную проверку
домашнего задания. Это помогает не только проверить, насколько усвоена предыдущая
тема, но и напомнить классу основные тезисы прошлых уроков.
Исключения составляют контрольные уроки.
3. Актуализация знаний учащихся по теме.
д.
4. Урок обобщения и систематизации знаний.
Форма выбирается свободная, по желанию учителя.
5. Контрольный урок.
Формы: как традиционные контрольные работы, зачеты, диктанты, сочинения, так и более
творческие виды: семинары, брифинги или консультации.
6. Интегрированные уроки. Формы свободные, так как задействованы 2 и более предметов
в одном уроке.
Этап V. Оборудование
Здесь перечисляется все, что будет использовать учитель в ходе урока. Это
мультимедийные презентации, репродукции картин, аудио и видео материалы, наглядные и
раздаточные материалы.
Этап VI. Ход урока
1.
сконцентрировать внимание учащихся, определить их собранность и готовность к уроку.
2. Проверка домашнего задания. Опытные педагоги практикуют ежеурочную проверку
домашнего задания. Это помогает не только проверить, насколько усвоена предыдущая
тема, но и напомнить классу основные тезисы прошлых уроков.
Исключения составляют контрольные уроки.
3. Актуализация знаний учащихся по теме. Актуализация помогает учащимся
настроиться на восприятие темы, обозначить круг вопросов, которые будут
рассматриваться на уроке. К тому же, актуализация дает возможность постановки
практической цели урока.
Например, прослушивание композиции П. Чайковского «Времена года» активизирует
фантазию, настраивает учащихся на то, что речь пойдет о времени года.
4. Объявление темы и целей урока. Учитель может сам обозначить тему и цель урока. А
можно подвести учащихся к этому в ходе предварительной беседы, составления кластера
или минитестирования.
5. Основная часть урока.
Эта часть урока будет различной в зависимости от вида и формы урока. Но принцип
построения один: от простого – к сложному, от общего – к частному.
6. Подведение итогов. Многие учителя заменяют этот этап рефлексией. Для учителя
важно понять, что усвоили учащиеся, какие вопросы остались непонятыми, какие
проблемы – неразрешенными.
Актуализация помогает учащимся
настроиться на восприятие темы, обозначить круг вопросов, которые будут
рассматриваться на уроке. К тому же, актуализация дает возможность постановки
практической цели урока.
Например, прослушивание композиции П. Чайковского «Времена года» активизирует
фантазию, настраивает учащихся на то, что речь пойдет о времени года.
4. Объявление темы и целей урока. Учитель может сам обозначить тему и цель урока. А
можно подвести учащихся к этому в ходе предварительной беседы, составления кластера
или минитестирования.
5. Основная часть урока.
Эта часть урока будет различной в зависимости от вида и формы урока. Но принцип
построения один: от простого – к сложному, от общего – к частному.
6. Подведение итогов. Многие учителя заменяют этот этап рефлексией. Для учителя
важно понять, что усвоили учащиеся, какие вопросы остались непонятыми, какие
проблемы – неразрешенными. 7. Выставление оценок. Данный этап не требует разъяснений. Есть лишь уточнение.
Оценки может выставлять сам учитель, анализируя и оценивая работу учащихся на уроке.
Организационный момент –—обязательный этап всех уроков.
Помогает В последнее время больше практикуется самооценка или систему накопительных баллов. В
этом случае ученики сами оценивают свою работу.
8. Домашнее задание.
Традиционно этот этап оставляют на конец урока. Но домашнее задание можно дать и в
начале, и в середине урока. Особенно, если на дом будет задано, например, написание эссе,
сочинения или выполнение практической работы. В этом случае учитель заранее
ориентирует внимание, что тезисы, разрабатываемые на уроке, будут важны при
выполнении домашнего задания.
Современная методика рекомендует помимо обязательного задания, предлагать учащимся
и варианты более сложного уровня или направленные на развитие творческих
способностей. Например, не просто выучить стихотворение, а еще и создать коллаж,
нарисовать рисунок по теме или подготовить доклад, презентацию.
7. Выставление оценок. Данный этап не требует разъяснений. Есть лишь уточнение.
Оценки может выставлять сам учитель, анализируя и оценивая работу учащихся на уроке.
Организационный момент –—обязательный этап всех уроков.
Помогает В последнее время больше практикуется самооценка или систему накопительных баллов. В
этом случае ученики сами оценивают свою работу.
8. Домашнее задание.
Традиционно этот этап оставляют на конец урока. Но домашнее задание можно дать и в
начале, и в середине урока. Особенно, если на дом будет задано, например, написание эссе,
сочинения или выполнение практической работы. В этом случае учитель заранее
ориентирует внимание, что тезисы, разрабатываемые на уроке, будут важны при
выполнении домашнего задания.
Современная методика рекомендует помимо обязательного задания, предлагать учащимся
и варианты более сложного уровня или направленные на развитие творческих
способностей. Например, не просто выучить стихотворение, а еще и создать коллаж,
нарисовать рисунок по теме или подготовить доклад, презентацию. Рекомендации:
1.Помните, что каждый урок должен содержать «изюминку».
Каждый урок должен содержать чтото, что вызовет удивление, изумление, восторг
детей одним словом, то, что они будут помнить, когда всё забудут. Это может быть
интересный факт, неожиданное открытие, красивый опыт, нестандартный подход к уже
известному, нестандартное задание, необычная форма подачи материала, интригующий
эпиграф – то, что будет способствовать заинтересованности учащихся.
2. Из психологопедагогической литературы известно, что:
1) забывание более интенсивно протекает сразу после изучения материала (в первый
день, в первые часы и даже минуты), затем оно замедляется;
2) повторение путем разнообразной деятельности, сводящейся хотя бы к некоторой
реконструкции материала, эффективнее, чем его повторение в неизменном виде;
3) рассредоточенное по времени повторение эффективнее, чем концентрированное.
3. Не забывайте о темпе занятия. Лучшие результаты достигаются в том случае, если
виды деятельности чередуются.
Рекомендации:
1.Помните, что каждый урок должен содержать «изюминку».
Каждый урок должен содержать чтото, что вызовет удивление, изумление, восторг
детей одним словом, то, что они будут помнить, когда всё забудут. Это может быть
интересный факт, неожиданное открытие, красивый опыт, нестандартный подход к уже
известному, нестандартное задание, необычная форма подачи материала, интригующий
эпиграф – то, что будет способствовать заинтересованности учащихся.
2. Из психологопедагогической литературы известно, что:
1) забывание более интенсивно протекает сразу после изучения материала (в первый
день, в первые часы и даже минуты), затем оно замедляется;
2) повторение путем разнообразной деятельности, сводящейся хотя бы к некоторой
реконструкции материала, эффективнее, чем его повторение в неизменном виде;
3) рассредоточенное по времени повторение эффективнее, чем концентрированное.
3. Не забывайте о темпе занятия. Лучшие результаты достигаются в том случае, если
виды деятельности чередуются. Добрый совет:
Анализируйте рабочие планы прошлых лет, сопоставляйте их с нынешними. Это дает
возможность совершенствовать этапы урока. НЕДОПУСТИМО неадаптированное
использование рабочих планов прошлых лет.
Добейтесь соответствия между целью урока, содержанием учебного материала, методами
обучения и формами организации познавательной деятельности учащихся. Чем выше будет
это соответствие на каждом этапе, в каждом учебновоспитательном моменте, тем
эффективнее будет конечный результат урока.
Подготовка к уроку – это подготовка к руководству мышлением учащихся. Для учителя
чрезвычайно важно заранее сформулировать вопросы таким образом, чтобы они будили
мысль учеников. Важно найти в изучаемом материале вопросы, которые могут возникнуть
у учащихся, чтобы облегчить им процесс усвоения.
Есть учителя, хорошо работающие, но не умеющие оценить свой труд и недооценивающие
его.
Есть учителя (и таких, к сожалению, большинство), переоценивающие свою работу и не
умеющие замечать собственные недостатки.
Добрый совет:
Анализируйте рабочие планы прошлых лет, сопоставляйте их с нынешними. Это дает
возможность совершенствовать этапы урока. НЕДОПУСТИМО неадаптированное
использование рабочих планов прошлых лет.
Добейтесь соответствия между целью урока, содержанием учебного материала, методами
обучения и формами организации познавательной деятельности учащихся. Чем выше будет
это соответствие на каждом этапе, в каждом учебновоспитательном моменте, тем
эффективнее будет конечный результат урока.
Подготовка к уроку – это подготовка к руководству мышлением учащихся. Для учителя
чрезвычайно важно заранее сформулировать вопросы таким образом, чтобы они будили
мысль учеников. Важно найти в изучаемом материале вопросы, которые могут возникнуть
у учащихся, чтобы облегчить им процесс усвоения.
Есть учителя, хорошо работающие, но не умеющие оценить свой труд и недооценивающие
его.
Есть учителя (и таких, к сожалению, большинство), переоценивающие свою работу и не
умеющие замечать собственные недостатки. Анализ собственной работы должен превратиться в органическую часть системы работы
учителя, тогда новый учебный год будет приносить ему новые успехи.
Анализ собственной работы должен превратиться в органическую часть системы работы
учителя, тогда новый учебный год будет приносить ему новые успехи.
Алгоритм и устройство планирования расписания загрузки процессоров в мультипроцессорных системах | Борзов
1. Гергель В.П. Теория и практика параллельных вычислений. М.: Бином, 2007.
2. Воеводин В.В. Вычислительная математика и структура алгоритмов. М.: МГУ, 2006.
3. Воеводин В.В., Воеводин Вл.В. Параллельные вычисления. СПб.: БХВ– Петербург, 2002. 608 с.
4. Богданов А.В., Станкова Е.Н., Мареев В.В., Корхов В.В. Архитектуры и топологии многопроцессорных вычислительных систем. 2-е изд., М., 2016. 135 с.
5. Новиков Ю.В., Скоробогатов П.К. Основы микропроцессорной техники. М.: Бином, 2009. 357 с.
Новиков Ю.В., Скоробогатов П.К. Основы микропроцессорной техники. М.: Бином, 2009. 357 с.
6. Yu-Kwоng Kwоk аnd Lар-Sun Сhеung. А nеw fuzzy-dесisiоn bаsеd lоаd bаlаnсing systеm fоr distributеd оbjесt соmрuting // Jоurnаl оf Раrаllеl аnd Distributеd Соmрuting. 2004. № 64. Р. 238-253.
7. Zhаng L., Wоng T.N. Sоlving intеgrаtеd рrосеss рlаnning аnd sсhеduling рrоblеm with соnstruсtivе mеtа-hеuristiсs. Inf. Sсi. 2016, 340–341, 1–16.
8. Zhаng S., Wоng T.N. Intеgrаtеd рrосеss рlаnning аnd sсhеduling: Аn еnhаnсеd аnt соlоny орtimizаtiоn hеuristiс with раrаmеtеr tuning // J. Intеll. Mаnuf. 2014. № 29. С. 1–17.
9. Борзов Д.Б., Ткачев П.Ю. Метод распараллеливания циклов со счетчиком // Известия вузов. Приборостроение. 2015. Т. 58. №2. С. 104–108.
Приборостроение. 2015. Т. 58. №2. С. 104–108.
10. Математическая модель выявления независимых параллельных участков последовательных программ / Д.Б. Борзов, С.А. Дюбрюкс, В.С. Титов, С.В. Прилуцкий // Нейрокомпьютеры: разработка, применение. 2009. №12. С. 37-41.
11. Борзов Д.Б., Борисенко Ю.В., Сизов А.С. Метод и аппаратно-ориентированный алгоритм переразмещения подпрограмм в мультикомпьютерах при отказе процессоров и связей между ними // Телекоммуникации. 2013. №11. С. 45-48.
12. Таненбаум Э. Архитектура компьютеров. СПб.: Питер, 2007. 848 с.
13. Цилькер Б.Я., Орлов С.А. Организация ЭВМ и систем. СПб.: Питер, 2006. 668 с.
14. Гусева А.И. Вычислительные системы, сети и телекоммуникации. М.: Academia, 2016. 640 с.
Гусева А.И. Вычислительные системы, сети и телекоммуникации. М.: Academia, 2016. 640 с.
15. Андон Ф. И., Кукса А. И., Поляченко Б. Е. Об оптимальном планировании процесса обработки на ЭВМ взаимосвязанных задач // Кибернетика. 1980. Я. 3. С. 51–53.
16. Blаzеwiсz J., Есkеr K., Реsсh Е., Sсhm idt G., Wеglаrz J. Hаndbооk оn Sсhеduling: Frоm Thеоry tо Аррliсаtiоns. Sеriеs: Intеrnаtiоnаl Hаndbооks оn Infоrmаtiоn Systеms, Sрringеr. Bеrlin, Gеrmаny, 2007, 647 р.
17. Борзов Д.Б., Масюков И.И. Планирование загрузки процессоров в мультипроцессорных системах критического назначения // Известия Юго-Западного государственного университета. 2018. Т. 22. №6 (81). С. 168-175. https://doi.org/10.21869/2223-1560-2018-22-6-168-175.
18. Борзов Д.Б., Басов Р.Г. Алгоритм планирования загрузки процессоров в мультипроцессорных системах // Машиностроение и техносфера XXI века: сборник трудов XXV Международной научно-технической конференции. Донецк, 2018. T.1. С. 37-39.
Борзов Д.Б., Басов Р.Г. Алгоритм планирования загрузки процессоров в мультипроцессорных системах // Машиностроение и техносфера XXI века: сборник трудов XXV Международной научно-технической конференции. Донецк, 2018. T.1. С. 37-39.
19. Кулачев А.П. Методы и средства анализа данных в среде Windоws. STАDIА 6.0. М.: Информатика и компьютеры, 2006. 270 с.
20. Лобанов В.И. Азбука разработчика цифровых устройств. М.: Горячая линия — Телеком, 2001. 192 с.
Памятка-алгоритм составления таблицы — Студопедия
1. Прочти текст.
2. Определи признаки, по которым можно систематизировать материал.
3. Начерти таблицу с определенным количеством граф.
4. Запишите название признаков в графы.
5. Запиши в соответствующие графы таблицы материалы из текста в сокращенном виде.
6. Сделай вывод.
7. Дополни текст собственными соображениями, систематизируй их в таблицу.
4.Памятка-алгоритм составления плана при работе с текстом.
1. Прочитать текст, продумать прочитаное.
2. Разбить текст на части и озаглавить каждую. В заголовках передать главную мысль каждого фрагмента.
3. В каждой части выделить несколько положений, развивающих главную мысль.
4. Проверить, отражают ли пункты плана основную мысль текста, связан ли последующий пункт плана с предыдущим.
5.Памятка-алгоритм приемов работы с текстом.
1. Чтение и анализ.
2. Сопоставительный анализ источника и мнения.
3. Анализ и аргументация автора.
4. Постановка вопросов к тексту.
5. Сравнительный анализ.
6. Отбор материала.
6.Памятка-алгоритм написания конспекта.
1. Перед конспектированием необходимо тщательно изучить конспектируемое произведение.
2. Конспектированию предшествует составление плана.
3. В начале конспекта необходимо точно указать фамилию и инициалы автора (или редактора сборника), полное название работы, место и год издания.
4. Наименование глав, разделов, параграфов конспектируемой работы всегда указывать точно.
5. Изложение текста дается сжато, но основные мысли и аргументы записываются подробно.
6. В конспекте можно использовать цитаты.
7. При оформлении конспекта используйте подчеркивания, условные знаки, пометки на полях.
7. Памятка-алгоритм анализа прозаического произведения.
Пошаговый алгоритм создания команды единомышленников. Часть 4. Составить план действий
Когда речь заходит о плане действий, часто начинаются многочисленные отговорки: «Зачем это нужно? Всё и так понятно!», «Давайте это сначала обдумаем», «Потом же делать придется!», «У меня сейчас высокая загрузка». Составление плана — процесс, который подразумевает ответственность и вдумчивость. Для того, чтобы избежать многочисленных отговорок и избегания ответственности, мы рекомендуем начинать со списка инициатив. И эти инициативы записывать, начиная с самого первого этапа цикла.
Для того, чтобы избежать многочисленных отговорок и избегания ответственности, мы рекомендуем начинать со списка инициатив. И эти инициативы записывать, начиная с самого первого этапа цикла.
После каждого этапа (мозговой штурм, визуальная история, анализ Уолта Диснея, анализ разрыва, SWOT-анализ, анализ силового поля, POEMS-анализ или любого другого) попросите участников взять половинки А4 или стикеры (половинки я рекомендую больше, т.к. их размер позволяет чётко и понятно записать достаточное количество информации) и записать свои предложения по поводу того, что надо сделать. 1 лист — 1 идея. Писать печатными буквами фломастером темного цвета (черный, синий, коричневый). Пока без критической оценки. И, возможно, даже не только то, что готовы сделать сами. Все предложения. Отвечаем на вопрос: «Что надо сделать?»
Записали? На этом этапе соберите сами все идеи, прикрепите их на флип-чарт. Прочитайте. Не критикуйте. Просто обсудите те возможности, которые дают записанные инициативы и вопросы, которые они вызывают.
Рис.1. Пример листа с идеями
Таких листов к концу мероприятия может быть много. В нашей практике бывали сессии и тренинги, когда их было 6 и даже 8. Важно, чтобы они всегда были на видном месте. Например, висели на стене с помощью бумажного малярного скотча. Нумеруйте листы, чтобы помнить, на каком этапе были сделаны записи.
Рис.2. Пример листов с идеями к концу тренинга или сессии
При планировании тренинга или сессии оставьте минут 30-40 на работу по формированию плана действий и распределение ответственности. Алгоритм формирования плана мы с Вами сейчас рассмотрим подробно. Распределения ответственности будет посвящена наша следующая статья.
Алгоритм формирования плана действий (ориентировочное время работы 20 минут)
Шаг 1. Предложите всем подойти к листам с идеями, которые заполнялись в течение всего мероприятия (см. Рис.2). Дайте 5 минут всем, чтобы молча индивидуально перечитать их, обдумать и выделить то, что необходимо сделать в самое ближайшее время, оценить реалистичность и важность действий.
Шаг 2. Дайте каждому участнику по 5 маленьких стикеров (например, таких, как на рис.3 оранжевого и зеленого цвета).
Рис.3. Пример стикеров, которые можно использовать для голосования
Попросите отметить стикерами 5 самых важных действий (оранжевые стикеры) и 5 самых срочных действий (зеленые стикеры). Важно: сначала дождитесь, пока все примут решение, куда прикрепить стикеры. Как только все приняли решение (я обычно прошу поднять руку тех, кто готов голосовать), можно одновременно подойти и прикрепить стикер рядом с тем решением, которому отдан голос.
Шаг 3. Подведите итоги голосования. Например, это может выглядеть как на рис.4.
Рис.4. Итоги голосования
Шаг 4. Лидеров рейтинга выпишите на отдельный лист — лист Действий (см. Рис.5).
Рис.5. Лист Действий
Теперь вы готовы перейти к распределения ответственности. Об этом в следующей статье!
Об этом в следующей статье!
Еще больше об атмосфере вовлечения -здесь.
Составление плана местности
Как составить план местности?
Предположим, вам требуется составить план местности. Для этого вам понадобятся: тренога, планшет, визирная линейка и хорошо отточенный карандаш.
Ход работы
- Установив треногу с планшетом на мосту через реку (отсюда мы начинаем съёмку), выберите масштаб, например 1 : 5000, и проведите стрелку «север — юг».
- Затем ориентируйте планшет по сторонам горизонта. Все местные предметы нужно наносить на план условными знаками. Прежде всего на плане надо изобразить мост через реку и в центр условного знака — моста — воткнуть булавку. Это будет ваша исходная точка.
- Теперь положите на планшет визирную линейку так, чтобы её край коснулся булавки. Направьте верхнее ребро линейки поочерёдно на те местные предметы, которые нужно изобразить на плане (куст, ветродвигатель, дом, колодец, дерево на берегу реки), и вычертите на планшете линии визирования на каждый объект.
- Когда линии визирования на все объекты проведены, определите одним из уже известных нам способов расстояние от моста до каждого из этих объектов.
- Пользуясь выбранным масштабом, отложите определённые расстояния на планшете и вычертите объекты условными знаками.
- Теперь можно нанести реку. Она течёт от дерева к мосту и далее к кустарнику. После этого линии визирования можно стереть.
- Дороги на плане изображаются приблизительно. Одна из них идёт от моста к дому, другая — к колодцу.
- Условными знаками обозначаем луг и смешанный лес. Точка, из которой мы производили визирование на местные предметы, называется полюсом. Поэтому этот способ съёмки местности получил название полярного.

Другие способы съёмки местности
Азимутальная съёмка является более простой по сравнению с полярной. Производится она примерно так же, как и полярная, только без планшета и визирной линейки. Расположившись у моста, определите азимуты на все те объекты, которые хотите нанести на план, и измерьте расстояние до них. Всё это запишите в блокнот.
Всё это запишите в блокнот.
Дома на чистом листе бумаги поставьте точку полюса и от неё отложите с помощью транспортира определённые на местности азимуты и расстояния в выбранном масштабе. Местные объекты обозначьте условными знаками.
Маршрутная съёмка — это съёмка значительных по протяжённости участков местности или объектов, например реки, дороги. Её производят из нескольких точек (полюсов). Работая на одном полюсе, осуществляют съёмку видимой части местности. Затем выбирают место для следующего полюса, определяют расстояние от начального полюса до него и азимут. Далее наносят полюс на планшет и повторяют всю процедуру съёмки. И так далее.
Планирование алгоритмов / Планирование движения
Обложка
Джеймс Каффнер
Рисунок на первой странице каждой части, автор:
Одри
[pdf файл] — Две страницы на одной. Рекомендуется для печати на бумаге US Letter.
Рекомендуется для печати на бумаге US Letter.
[pdf файл] — Две страницы на одной. Рекомендуется для печати на бумаге формата А4.
[pdf файл] — Одна страница на одной (крупный шрифт). Может быть проще для просмотра в Интернете.
| ЧАСТЬ I: ВВОДНЫЙ МАТЕРИАЛ [pdf] | |||
| Глава 1. Введение [pdf] | Мотивация, примеры, приложения, концепции планирования высокого уровня, обзор книги. | ||
| Глава 2: Дискретное планирование [pdf] | Возможное планирование, оптимальное планирование, алгоритмы поиска, A *, алгоритм Дейкстры, поиск вперед, поиск назад, двунаправленный поиск, итерация значений, логическое планирование, STRIPS, график плана, планирование как выполнимость. | ||
| ЧАСТЬ II: ПЛАНИРОВАНИЕ ДВИЖЕНИЯ [pdf] | |||
| Глава 3: Геометрические представления и преобразования [pdf] | Полигональные, многогранные и полуалгебраические модели. Трансформации твердого тела,
3D вращения, кинематические цепи, параметры Денавита-Хартенберга, кинематика
деревья, нежесткие преобразования. Трансформации твердого тела,
3D вращения, кинематические цепи, параметры Денавита-Хартенберга, кинематика
деревья, нежесткие преобразования. | ||
| Глава 4: Пространство конфигурации [pdf] | Топологические пространства, многообразия, пути. C-пространство жесткого тела, цепи тел и деревья тел. Пространство конфигурации. Кватернионы. C-пространство препятствия, замкнутые кинематические цепи, алгебраические многообразия. | ||
| Глава 5: Планирование движения на основе выборки [pdf] | Метрические пробелы, мера, случайная выборка, выборка с низким расхождением, выборка с низкой дисперсией, сетки, решетки, обнаружение столкновений, быстро исследуемые случайные деревья (RRT), Вероятностные дорожные карты (PRM), рандомизированные потенциальные поля. | ||
| Глава 6: Комбинаторное планирование движения [pdf] | Вертикальная декомпозиция ячеек, кратчайшие дорожные карты,
дорожные карты с максимальным клиренсом, цилиндрические алгебраические
декомпозиция, алгоритм Кэнни, границы сложности, Давенпорт-Шинцеля
последовательности. | ||
| Глава 7: Расширения Basic Motion Planning [pdf] | Непостоянные задачи, настройка скорости, координация нескольких роботов, гибридные системы, планирование манипуляции, сворачивание белка, развязывание узлов, замкнутые цепи, генератор случайных циклов (RLG), планирование покрытия, оптимальное планирование движения. | ||
| Глава 8: Планирование движения с обратной связью [pdf] | Навигационные функции, гладкие многообразия, векторные поля, числовые потенциальные функции, оптимальные навигационные функции, композиции воронок, динамическое программирование на непрерывных пространствах. | ||
| ЧАСТЬ III: ТЕОРЕТИЧЕСКОЕ ПЛАНИРОВАНИЕ РЕШЕНИЙ [pdf] | |||
| Глава 9: Основная теория принятия решений [pdf] | Оптимизация и обзор вероятностей, игры против природы,
Байесовская классификация, игры с нулевой суммой, игры с ненулевой суммой,
Равновесия по Нэшу, теория полезности, критика теории принятия решений. | ||
| Глава 10: Теория последовательных решений [pdf] | Последовательные игры против природы, итерация значения, итерация политики, бесконечное планирование, дисконтированная стоимость, средняя стоимость, обучение с подкреплением, последовательные игры. | ||
| Глава 11: Датчики и информационные пространства [pdf] | Информационные пространства и информационные отображения, неопределенность восприятия, дискретные и непрерывные датчики, POMDP, фильтрация Калмана, фильтрация частиц, информационные пространства в играх. | ||
| Глава 12: Планирование с учетом неопределенности [pdf] | Итерация значений для планирования в условиях неопределенности восприятия. Робот локализация, отображение, навигация, поиск, на основе видимости преследование-уклонение, манипуляция с ощущением неуверенности. | ||
| ЧАСТЬ IV: ПЛАНИРОВАНИЕ В УСЛОВИЯХ ДИФФЕРЕНЦИАЛЬНЫХ ОГРАНИЧЕНИЙ [pdf] | |||
| Глава 13: Дифференциальные модели [pdf] | Кинематические ограничения, автомобиль Дубинса, автомобиль Ридса-Шеппа,
дифференциальные приводы, тягач автомобиля, фазовое пространство, твердофазный
динамика, динамика цепочки тел, ньютоновская механика,
Уравнение Эйлера-Лагранжа, вариационные принципы, уравнения Гамильтона. уравнения, дифференциальные игры. уравнения, дифференциальные игры. | ||
| Глава 14: Планирование на основе выборки при дифференциальных ограничениях [pdf] | Препятствия в фазовом пространстве, неголономное планирование, кинодинамическое планирование, планирование траектории, анализ достижимости, примитивы движения, планирование на основе выборки, неголономный планировщик Барраквана-Латомба, RRT, планирование обратной связи, метод планирования и преобразования, ограниченный путь планирование траектории, градиентная оптимизация траектории. | ||
| Глава 15: Теория систем и аналитические методы [pdf] | Свойства системы, устойчивость, функции Ляпунова, управляемость,
STLC, уравнение Гамильтона-Якоби-Беллмана, максимум Понтрягина
принцип, кривые Дубинса, кривые Ридса-Шеппа, кривые Балккома-Мейсона,
системы аффинного управления, распределения, теорема Фробениуса, Чоу-Рашевский
теорема, скобки Ли, управляющая алгебра Ли, П. Основание холла, рулевое управление с
кусочно-постоянные входы, рулевое управление с синусоидами. Основание холла, рулевое управление с
кусочно-постоянные входы, рулевое управление с синусоидами. |
Алгоритм планирования — обзор
3.5 Целевой агент
Предыдущие агенты следовали фиксированному набору правил, которые были полностью определены программистом. Если мы попытаемся использовать один и тот же агент для решения аналогичной задачи с немного измененными параметрами, агент, как правило, потерпит неудачу. Он также часто терпит неудачу, если сталкивается с мировым состоянием, которое программист не предвидел.
С добавлением целей и ориентации на цели мы стремимся решить эти проблемы и дать нашему агенту определенную степень автономии и адаптируемости. Агент, ориентированный на достижение цели, больше не будет просто следовать заранее определенным указаниям. Скорее, он будет иметь возможность выбирать свои действия, исходя из того, какое из них поможет ему достичь цели.
Обратите внимание, что у агента всегда будут цели — по крайней мере, одна из них уже задана самой задачей. Ориентация на цели относится к прямому использованию целей при принятии решений агентом.Поэтому агент, ориентированный на цель, должен уметь планировать — выбирать серию действий, ведущих к цели.
Ориентация на цели относится к прямому использованию целей при принятии решений агентом.Поэтому агент, ориентированный на цель, должен уметь планировать — выбирать серию действий, ведущих к цели.
В качестве примера рассмотрим агента, цель которого — достичь конца уровня в приключенческой игре, где конец заблокирован запертой дверью (здесь мы предполагаем, что агент знает расположение мира). Этот агент должен будет найти и выполнить ряд действий, в результате которых он подберет ключ, откроет дверь и продолжит путь до конца.
Существует множество алгоритмов планирования — планирование средств-целей с регрессией цели, графическое планирование, частичное планирование заказов и т. Д.Все эти алгоритмы требуют предварительного знания требований и последствий каждого из возможных действий агента и используют эти знания для создания плана для агента по достижению желаемого состояния цели. Обратите внимание, что такой план часто будет содержать неявные (или в некоторых алгоритмах явные) определения новых целей, такие как получение ключа в приведенном выше примере. Более подробное описание каждого из этих алгоритмов доступно в [2].
Более подробное описание каждого из этих алгоритмов доступно в [2].
Когда требования к действию и эффекты просты и не взаимодействуют друг с другом сложным образом, часто используется поиск в пространстве состояний.В качестве примера мы рассмотрим одну из наиболее распространенных проблем поиска в пространстве состояний — поиск пути. При поиске пути агент должен на каждом шаге решать, в каком направлении двигаться, чтобы достичь пункта назначения в известной схеме мира. Наш примерный агент может, например, использовать один из приведенных выше алгоритмов планирования для определения плана верхнего уровня Поднять ключ → Открыть дверь → Выход , а затем остаться с проблемой поиска пути нижнего уровня для каждого этих промежуточных целей.
Если бы мы попытались решить проблему поиска пути без ориентации на цель, нам нужно было бы дать нашему агенту точные, заранее определенные направления для достижения пункта назначения, такие как «пройдите вперед 50 метров», «поверните направо» и т. Д. затем попытались отправить того же агента в другое место, нам нужно было бы вручную настроить его выбор направления, иначе он полностью потерпел бы неудачу.
Д. затем попытались отправить того же агента в другое место, нам нужно было бы вручную настроить его выбор направления, иначе он полностью потерпел бы неудачу.
Наиболее широко используемый алгоритм в поиске пути (а также во многих других задачах поиска в пространстве состояний) — это A * [15], который кратко описывается в разделе 5.5. Мы можем объяснить его популярность тем, что он быстро и надежно находит кратчайший путь к месту назначения. В последнее время также часто используются улучшенные версии A *, такие как варианты D * [16–18], особенно в динамических средах.
Ориентация на цель также позволяет агенту адаптироваться к изменениям в мире, поскольку он всегда может изменить свой текущий план, если представится лучшая альтернатива (например, открывается дверь, опускается мост, засыпает охранник). Поэтому агенты на основе целей хорошо работают даже в стохастических средах (хотя они по-прежнему лучше работают в детерминированных средах), но наибольшее улучшение наблюдается в последовательных средах.
В некоторых частично наблюдаемых средах целевые агенты по-прежнему будут бороться, если невидимые части мира жизненно важны для алгоритма поиска в пространстве состояний. Например, если мы хотим использовать ориентированный на цель агент поиска пути в мире, расположение которого он не знает, агент потерпит неудачу.
Поскольку проблема поиска пути очень распространена в играх, ориентация на цель, вероятно, является наиболее важным улучшением. Его можно найти, например, в современных версиях агентов на основе памяти в играх-стрелялках, описанных выше, поскольку теперь агенты могут не только вспомнить место, где игрок был в последний раз замечен, но также могут создать и выполнить план достижения этого места.В качестве конкретного примера мы рассмотрим The Last of Us (2013), где враги (различные типы зомби-подобных существ, а также обычные люди) запоминают местоположение игрока после того, как увидят или услышат его, и будут двигаться к нему, когда они больше не могут воспринимать игрока.
Из-за того, насколько фундаментальна проблема поиска пути, методы ее решения часто уже указаны в самом игровом движке, и поэтому мы могли бы фактически рассматривать вышеупомянутые агенты как просто агенты, основанные на памяти (а не нацеленные на цели).Однако ориентацию на цель можно найти и в других аспектах принятия решений агентом. В качестве примера мы снова посмотрим на Skyrim, где последователи (персонажи, следующие за игроком и помогающие ему) демонстрируют целенаправленное поведение. У них есть набор предопределенных целей, которые они могут выбрать (например, победить врага, который атаковал игрока, или защитить игрока от атаки), и будут использовать разные методы для достижения цели, в зависимости от текущей ситуации (если они слишком подальше они сначала подойдут ближе, если вокруг есть трупы, они могут использовать заклинание реанимации и т. д.).
Алгоритм планирования пути помогает дронам для подсчета пингвинов
Послушать статью |
Один из автономных дронов, используемых для обследования пингвинов в Антарктике. Кредит: Паркер Левинсон
Кредит: Паркер Левинсон
Исследователь из Стэнфордского университета Мак Швагер вошел в мир подсчета пингвинов благодаря случайной встрече на свадьбе своей невестки в июне 2016 года. Там он узнал, что Энни Шмидт, биолог из Point Blue Conservation Science, ищет лучший способ представьте себе большую колонию пингвинов в Антарктиде.Швагер, доцент кафедры аэронавтики и космонавтики в Стэнфордском университете, увидел возможность сотрудничества, учитывая его работу по управлению группами автономных летающих роботов.
Вот так, три с половиной года спустя, аспирант Швагера, Кунал Шах, оказался на знаменитой станции Мак-Мердо, готовый к первому испытательному полету в Антарктике своей новой системы съемки с несколькими дронами, которая координирует полет несколько высококлассных автономных дронов, но также могут работать с дронами для любителей.
У проекта не было удачного старта. «Руки мерзли. Батареи дрона были слишком холодными, чтобы работать. Пульт ДУ дрона был слишком холодным. Мой телефон был слишком холодным и мигал предупреждения », — вспоминает Шах. «Я просто подумал:« Я здесь два с половиной месяца, а сейчас день первый »».
Мой телефон был слишком холодным и мигал предупреждения », — вспоминает Шах. «Я просто подумал:« Я здесь два с половиной месяца, а сейчас день первый »».
Не испугавшись, Шах и его коллеги быстро адаптировались, и их система, которая является предметом статьи, опубликованной в журнале Science Robotics , неоднократно производила подробные визуальные исследования примерно 300000 пар пингвинов Адели на площади 2 квадратных километра у мыса. Крозье — примерно соответствует размеру страны Монако — и еще одна меньшая колония, насчитывающая около 3000 гнездящихся пар на мысе Ройдс.В то время как предыдущие исследования колонии на мысе Крозье с пилотируемыми людьми дронами занимали два дня, каждый раунд нового исследования, проведенного в сотрудничестве с Национальным научным фондом (NSF) и Антарктической программой США (USAP), завершался примерно за два дня. — полчаса, благодаря алгоритму планирования маршрута, который координировал работу двух-четырех автономных дронов и уделял приоритетное внимание эффективному охвату колонии.
«Просто перенести все это оборудование на удаленное место и иметь возможность подготовить его, разместить и развернуть, имея в своем распоряжении только палатки и небольшую хижину для обогрева, это действительно феноменально», — сказал Швагер, старший автор статьи, но, к его разочарованию, не смог присоединиться к полевой команде.«Это действительно показывает, насколько практичными автономные роботизированные системы могут быть в удаленных средах».
Скорость важна
Аэрофотосъемка колоний пингвинов проводилась и раньше, обычно с помощью вертолетов или одного беспилотника. Вертолетный метод обеспечивает отличное качество изображения, но является дорогостоящим, неэффективным по расходу топлива и рискует потревожить птиц. Съемка с помощью одного беспилотника занимает много времени и — поскольку дроны должны запускаться с безопасного расстояния, примерно в пяти километрах (трех милях) от колонии, — трудно ориентироваться.Еще одним недостатком дронов является то, что они должны летать в колонию, обратно и обратно, имея всего 12-15 минут автономной работы. Постоянная угроза внезапных изменений условий полета еще больше увеличивает важность быстрого обследования.
Съемка с помощью одного беспилотника занимает много времени и — поскольку дроны должны запускаться с безопасного расстояния, примерно в пяти километрах (трех милях) от колонии, — трудно ориентироваться.Еще одним недостатком дронов является то, что они должны летать в колонию, обратно и обратно, имея всего 12-15 минут автономной работы. Постоянная угроза внезапных изменений условий полета еще больше увеличивает важность быстрого обследования.
Использование нескольких дронов позволяет обойти эти проблемы, и это стало возможным благодаря уникальному алгоритму планирования маршрута, разработанному исследователями из Стэнфорда. Учитывая пространство для исследования, алгоритм разделил пространство, назначил каждому дрону точки назначения и выяснил, как перемещать дроны через эти точки наиболее эффективным способом, ограничивая обратное отслеживание и избыточное перемещение.Одним из важных дополнительных требований было то, что каждый дрон покидал пространство в том же месте, где он вошел, что экономит драгоценное время полета. Алгоритм также поддерживал безопасное, постоянное расстояние от земли, несмотря на изменения высоты, и имел настраиваемый процент перекрытия изображений для обеспечения полной съемки. В отличие от возвратно-поступательного движения робота-пылесоса, Швагер описал пути алгоритма как «органические и паучьи».
Алгоритм также поддерживал безопасное, постоянное расстояние от земли, несмотря на изменения высоты, и имел настраиваемый процент перекрытия изображений для обеспечения полной съемки. В отличие от возвратно-поступательного движения робота-пылесоса, Швагер описал пути алгоритма как «органические и паучьи».
«Процесс был быстрым. То, что накануне было просто волнистыми линиями алгоритма на экране, превратилось в массивное изображение всех пингвинов в колониях », — сказал Шах, ведущий автор статьи.«Мы могли видеть людей, гуляющих по колониям, и всех отдельных птиц, которые гнездились, прилетали в океан и выходили из него. Это было невероятно.»
Визуализация автономных маршрутов дронов, определенных алгоритмом планирования пути над колонией пингвинов Адели на мысе Крозье в Антарктиде, которая покрывает примерно 2 квадратных километра. Кредит: Кунал Шах
Глаза в небе
Исследователи предполагают, что их система с несколькими дронами может быть использована и в других целях, таких как мониторинг трафика и отслеживание лесных пожаров. Они уже проводили тесты в различных условиях. Они пролетели над большим ранчо в Марине, Калифорния, чтобы оценить растительность, доступную для выпаса скота. Они также взяли свои дроны на озеро Моно недалеко от границы Калифорнии и Невады, чтобы исследовать популяцию калифорнийских чаек, обитающих недалеко от острова Паоха в центре озера. Как и в случае с Антарктидой, у теста на озере Моно были свои проблемы — птицы были меньше, исследователям приходилось плыть к месту, прежде чем выпустить дронов, и был риск потерять дронов в воде (чего, к счастью, не произошло). .
Они уже проводили тесты в различных условиях. Они пролетели над большим ранчо в Марине, Калифорния, чтобы оценить растительность, доступную для выпаса скота. Они также взяли свои дроны на озеро Моно недалеко от границы Калифорнии и Невады, чтобы исследовать популяцию калифорнийских чаек, обитающих недалеко от острова Паоха в центре озера. Как и в случае с Антарктидой, у теста на озере Моно были свои проблемы — птицы были меньше, исследователям приходилось плыть к месту, прежде чем выпустить дронов, и был риск потерять дронов в воде (чего, к счастью, не произошло). .
Со своей стороны, биологи по пингвинам по-прежнему сосредоточены на измерении размера популяции, рождаемости и плотности гнездования и в этом году проведут второй раунд наблюдений за пингвинами. Однако из-за пандемии научная группа Point Blue Conservation Science на этот раз будет предоставлена самостоятельно.
Размышляя об общей картине — в переносном смысле — исследователи надеются, что их система является свидетельством положительного потенциала автономных роботов и систем.
«Люди никогда не смогут прыгнуть в небо и насчитать 300 000 пингвинов или отследить лесной пожар», — сказал Швагер.«Я думаю, что команды автономных роботов действительно могут быть мощными, помогая нам управлять нашим изменяющимся миром, нашей изменяющейся средой в таком масштабе, который мы никогда не могли раньше».
Примечание редактора: Эта статья была переиздана из Stanford University News.
Колония пингвинов Адели на мысе Крозье. Кредит: Паркер Левинсон
.Новый эффективный алгоритм планирования движения стержня в двумерном многоугольном пространстве
J.Л. Бентли и А. Оттман, Алгоритм сообщения и подсчета геометрических пересечений, IEEE Trans. Comput. , 28 (1979), 643–647.
MATH Статья Google Scholar
Дж. Хопкрофт и Г. Уилфонг, О движении соприкасающихся объектов, Технический отчет 84-602, факультет компьютерных наук, Корнельский университет, 1984.
К. Кедем и М. Шарир, Эффективный алгоритм для планирования поступательного бесстолкновительного движения выпуклого многоугольного объекта в 2-мерном пространстве среди многоугольных препятствий, Труды симпозиума ACM по вычислительной геометрии , 1985, стр.75–80.
К. Кедем, Р. Ливне, Дж. Пах и М. Шарир, О объединении областей Иордана и бесстолкновительном поступательном движении среди многоугольных препятствий, Discrete Comput. Геом. , 1 (1986), 59–71.
MATH Статья MathSciNet Google Scholar
Д. Левен и М. Шарир, Эффективный и простой алгоритм планирования движения для лестницы, движущейся в двумерном пространстве среди многоугольных барьеров, Proceedings of the ACM Symposium on Computational Geometry , 1985, pp. .221–227 (также появится в J. Algorithms. )
Д. Левен и М. Шарир, Планирование чисто поступательного движения выпуклого объекта в двумерном пространстве с использованием обобщенных диаграмм Вороного, Дискретное вычисление. Геом. , 2 (1987), 9–31.
Геом. , 2 (1987), 9–31.
MATH Статья MathSciNet Google Scholar
E. E. Moise, Геометрическая топология в размерности 2 и 3, Springer-Verlag, New York, 1977.
MATH Google Scholar
К. О’Данлинг, М. Шарир и К. Яп, Обобщенные диаграммы Вороного для лестницы: I. Топологические соображения, Comm. Pure Appl. Математика. , 39 (1986), 423–483.
MATH Статья MathSciNet Google Scholar
К. О’Данлинг и К. Яп, Метод отвода для планирования движения диска, J.Алгоритмы , 6 (1985), 104–11.
MATH Статья MathSciNet Google Scholar
К. О’Данлейнг, М. Шарир и К. Яп, Обобщенные диаграммы Вороного для лестницы: II. Эффективное построение диаграммы, Algorithmica , 2 (1987), 27–59.
MATH Статья MathSciNet Google Scholar
Дж.О’Рурк, Нижние границы для перемещения лестницы, Технический отчет, Департамент EECS, Университет Джона Хопкинса, 1985.
Дж. Т. Шварц и М. Шарир, О проблеме перемещения пианино: I. Случай твердое многоугольное тело, движущееся среди многоугольных барьеров, Comm. Pure Appl. Математика. , 36 (1983), 345–398.
MATH Статья MathSciNet Google Scholar
Дж. Т. Шварц и М.Шарир, О проблеме пианино-грузчиков: II. Общие методы вычисления топологических свойств вещественных алгебраических многообразий, Adv. в Прил. Математика. , 4 (1983), 298–351.
MATH Статья MathSciNet Google Scholar
Дж. Т. Шварц и М. Шарир, О проблеме пианистов: III. Координация движения нескольких независимых тел: частный случай круглых тел, движущихся среди многоугольных барьеров, Robotics Res. , 2 (1983), 46–75.
, 2 (1983), 46–75.
Артикул MathSciNet Google Scholar
Дж. Т. Шварц и М. Шарир, О проблеме пианино-движителей: V. Случай стержня, движущегося в трехмерном пространстве среди многогранных препятствий, Comm. Pure Appl. Математика. , 37 (1984), 815–848.
MATH Статья MathSciNet Google Scholar
Дж.Т. Шварц и М. Шарир, Эффективные алгоритмы планирования движения в средах ограниченной локальной сложности, Технический отчет, Департамент компьютерных наук, Институт Куранта, 1985.
М. Шарир и Э. Ариэль-Шеффи, О Проблема пианистов-грузчиков: IV. Различные разложимые двумерные задачи планирования движения, Comm. Pure Appl. Математика. , 37 (1984), 479–493.
MATH Статья MathSciNet Google Scholar
С. К. Яп, Координация движения нескольких дисков, Технический отчет 105, Департамент компьютерных наук, Институт Куранта, 1984.
К. Яп, Координация движения нескольких дисков, Технический отчет 105, Департамент компьютерных наук, Институт Куранта, 1984.
Базовый алгоритм планирования POCL
Базовый алгоритм планирования POCLМы кратко рассмотрим, как работают планировщики POCL, и представим терминология, используемая в этой статье. Для подробного ознакомления к планированию POCL, мы отсылаем читателя к руководству по крайней мере Планирование обязательств по Weld (1994).
(Частичный) план может быть представлен кортежем
,,,, где
является
набор действий,
набор причинно-следственных связей,
а
набор ограничений порядка, определяющих частичный порядок на множестве , а также
набор обязательных ограничений на
параметры действия (
= если наземные воздействия
использовал). Каждое действие a является экземпляром некоторой схемы действий A в
область планирования, а план может содержать несколько экземпляров
та же схема действий.Причинно-следственная связь, a i a j , представляет собой
обязательство планировщика, что предварительным условием q действий a j является
выполняться эффектом действия a i .
открытое состояние , a i , является предварительным условием q действие a i , которое еще не было связано с эффектом другого действие. небезопасная ссылка (или угроза ) является причинной связью, a i a j , чье условие q объединяется с отрицанием эффект действия, который можно было бы заказать между a i и a j . Набор из изъянов плана является объединением открытые условия и небезопасные ссылки: знак равно
Планировщик POCL ищет решение проблемы планирования в
пространство частичных планов, пытаясь устранить все недостатки в плане.Алгоритм 1 показывает общую процедуру планирования POCL.
что данная проблема планирования возвращает план решения проблемы (или
отказ, если данная проблема не имеет решения). Проблема планирования — это
набор начальных условий
и набор целей , и представляет собой первоначальный план с двумя фиктивными
действия a 0 a , где эффекты a 0 представляют
начальные условия задачи и предварительные условия a представляют цели проблемы. Процедура
M AKE- I NITIAL- P LAN , используемый в алгоритме 1, возвращает
план
{ a 0 , a } ,, { a 0 a } ,. Множество
из сгенерированных, но
еще не посещены, частичные планы сохранены. На каждом этапе планирования
процесс, план выбирается и удаляется из
, а затем
изъян выбран для этого плана. Разрешение всех возможных доработок
дефект (возвращенный процедурой R EFINEMENTS ) добавлен в , и процесс продолжается до тех пор, пока
пустой
(указывает на неудачу) или найден план без изъянов.
Процедура
M AKE- I NITIAL- P LAN , используемый в алгоритме 1, возвращает
план
{ a 0 , a } ,, { a 0 a } ,. Множество
из сгенерированных, но
еще не посещены, частичные планы сохранены. На каждом этапе планирования
процесс, план выбирается и удаляется из
, а затем
изъян выбран для этого плана. Разрешение всех возможных доработок
дефект (возвращенный процедурой R EFINEMENTS ) добавлен в , и процесс продолжается до тех пор, пока
пустой
(указывает на неудачу) или найден план без изъянов.
Открытое состояние, a i , можно разрешить, связав q с
эффект существующего или нового действия. Небезопасная ссылка, a i a j под угрозой воздействия p действий a k , can
быть разрешено путем заказа a k перед a i ( понижение ) или
заказав a k после a j ( продвижение ). Если мы используем поднятый
действиями вместо наземных, угроза также может быть устранена
добавление ограничений привязки так, чтобы p и ¬ q не могли быть объединены
( отделение ).
Если мы используем поднятый
действиями вместо наземных, угроза также может быть устранена
добавление ограничений привязки так, чтобы p и ¬ q не могли быть объединены
( отделение ).
2003-08-26
Алгоритм планирования лечения обратной проекции с итеративным фильтром для томотерапии
Цель: Описан обратный алгоритм планирования лечения при томотерапии.
Методы и материалы: Алгоритм итеративно вычисляет набор неотрицательных профилей интенсивности пучка, который минимизирует остаточную дозу методом наименьших квадратов, определенную в целевой и выбранных областях нормальной ткани, представляющих интерес. На каждой итерации распределение остаточной дозы преобразуется в набор профилей остаточного пучка с использованием метода инверсии, полученного на основе теории восстановления отфильтрованного изображения с обратной проекцией. Эти «остаточные» профили используются для корректировки текущих оценок профиля пучка, что приводит к новым оценкам профиля. Адаптивная фильтрация включена в модель инверсии, так что общая структура распределения дозы оптимизируется во время начальных итераций алгоритма, а тонкая структура, соответствующая краям, получается на более поздних итерациях. Трехмерная модель дозы сверток / суперпозиции на основе ядра используется для расчета дозы во время каждой итерации.
Эти «остаточные» профили используются для корректировки текущих оценок профиля пучка, что приводит к новым оценкам профиля. Адаптивная фильтрация включена в модель инверсии, так что общая структура распределения дозы оптимизируется во время начальных итераций алгоритма, а тонкая структура, соответствующая краям, получается на более поздних итерациях. Трехмерная модель дозы сверток / суперпозиции на основе ядра используется для расчета дозы во время каждой итерации.
Полученные результаты: Представлены два клинически значимых примера планирования лечения, иллюстрирующих использование алгоритма для планирования конформной лучевой терапии груди и простаты.Решения обычно достигаются за 10-20 итераций, требующих около 20 часов процессорного времени с использованием рабочей станции среднего уровня. Большая часть расчетного времени уходит на трехмерный расчет дозы.
Выводы: Алгоритм обратного планирования лечения является полезным исследовательским инструментом для изучения возможностей томотерапии для конформной лучевой терапии. Необходима дальнейшая работа для (а) достижения клинически приемлемого времени вычислений; (б) проверить алгоритм с использованием технологии многолепесткового коллиматора; и (c) распространить метод на биологические цели.
AtsushiSakai / PythonRobotics: Примеры кодов Python для алгоритмов робототехники.
кодов Python для алгоритма робототехники.
Это набор кода Python для алгоритмов робототехники.
Характеристики:
Легко читать, чтобы понять основную идею каждого алгоритма.
Выбраны широко используемые и практичные алгоритмы.
Минимальная зависимость.

Подробнее см. Этот документ:
Для запуска каждого образца кода:
Python 3.9.x
число
scipy
матплотлиб
панды
cvxpy
Для разработки:
pytest (для модульных тестов)
pytest-xdist (для параллельных модульных тестов)
mypy (для проверки типа)
Sphinx (для генерации документов)
pycodestyle (для проверки стиля кода)
В этом README показаны только некоторые примеры этого проекта.
Если вас интересуют другие примеры или математические основы каждого алгоритма,
Вы можете проверить полную документацию в Интернете: https://pythonrobotics.readthedocs.io/
Все анимационные гифки хранятся здесь: AtsushiSakai / PythonRoboticsGifs: Анимационные гифки PythonRobotics
- Клонировать это репо.
git clone https://github.com/AtsushiSakai/PythonRobotics.git
- Установите необходимые библиотеки.
с использованием conda:
conda env create -f environment.yml
с использованием pip:
pip install -r requirements.txt
Выполнить скрипт Python в каждом каталоге.
Добавьте звезду к этому репо, если оно вам нравится 😃.
Локализация расширенного фильтра Калмана
Документация: Ноутбук
Расположение сажевого фильтра
Это локализация слияния датчиков с сажевым фильтром (PF).
Синяя линия — истинная траектория, черная линия — точная траектория,
, а красная линия — расчетная траектория с PF.
Предполагается, что робот может измерять расстояние до ориентиров (RFID).
Эти измерения используются для локализации ПФ.
Ссылка:
Локализация фильтра гистограммы
Это пример 2D-локализации с фильтром гистограммы.
Красный крест — истинная позиция, черные точки — позиции RFID.
Синяя сетка показывает вероятность положения фильтра гистограммы.
В этом моделировании x, y неизвестны, рыскание известно.
Фильтр объединяет входные данные скорости и измерения дальности от RFID для определения местоположения.
Исходное положение не требуется.
Ссылка:
Гауссова сеточная карта
Это пример отображения двухмерной гауссовой сетки.
Карта сетки лучей
Это пример отображения сетки 2D-лучей.
Лидар на сеточную карту
В этом примере показано, как преобразовать двумерное измерение дальности в сеточную карту.
Кластеризация объектов k-средних
Это кластеризация двухмерных объектов с использованием алгоритма k-средних.
Прямоугольник
Это двухмерная прямоугольная арматура для обнаружения транспортных средств.
Примеры одновременной локализации и сопоставления (SLAM)
Итеративное соответствие ближайшей точки (ICP)
Это пример двумерного сопоставления ICP с разложением по сингулярным числам.
Он может вычислять матрицу вращения и вектор перемещения между точками и точками.
Ссылка:
FastSLAM 1.0
Это пример SLAM на основе функций с использованием FastSLAM 1.0.
Синяя линия — наземная истина, черная линия — точный счет, красная линия — расчетная траектория с FastSLAM.
Красные точки — это частицы FastSLAM.
Черные точки — это ориентиры, синие кресты — это оценочные позиции ориентира с помощью FastSLAM.
Ссылка:
Подход с динамическим окном
Это пример кода 2D-навигации с динамическим оконным подходом.
Поиск по сетке
Алгоритм Дейкстры
Это двухмерная сетка, основанная на планировании кратчайшего пути с помощью алгоритма Дейкстры.
В анимации ищутся голубые точки.
A * алгоритм
Это двухмерная сетка, основанная на планировании кратчайшего пути с алгоритмом «звезда».
В анимации ищутся голубые точки.
Его эвристика — это двумерное расстояние Евклида.
D * алгоритм
Это двухмерная сетка, основанная на планировании кратчайшего пути с алгоритмом D-звезды.
Анимация показывает, как робот находит свой путь, избегая препятствия, используя алгоритм поиска D *.
Ссылка:
Алгоритм потенциального поля
Это планирование пути на основе 2D-сетки с алгоритмом потенциального поля.
В анимации синяя тепловая карта показывает потенциальное значение на каждой сетке.
Ссылка:
Планирование пути покрытия на основе сетки
Это моделирование планирования пути покрытия на основе 2D-сетки.
Планирование государственных сетей
Этот сценарий представляет собой код планирования пути с планированием решетки состояний.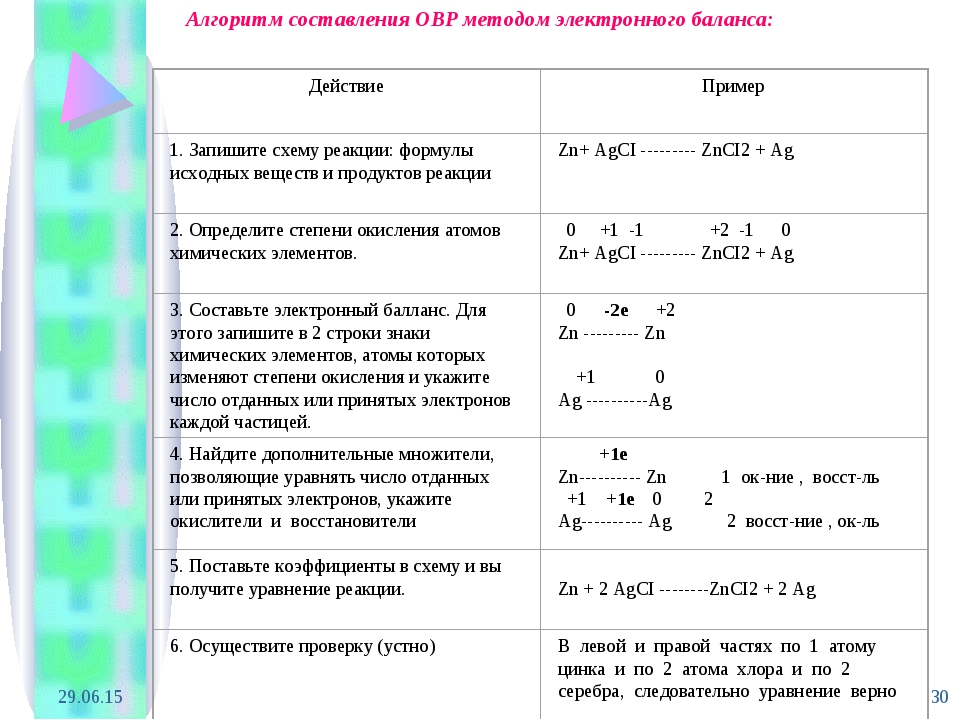
Этот код использует генератор прогнозирующей траектории модели для решения краевой задачи.
Ссылка:
Смещенная полярная выборка
Дорожный отбор
Планирование вероятностной дорожной карты (PRM)
Этот планировщик PRM использует метод Дейкстры для поиска графов.
В анимации синие точки — это точки выборки,
Голубые крестики означают найденные по методу Дейкстры точки,
Красная линия — это последний путь PRM.
Ссылка:
Быстро исследуемые случайные деревья (RRT)
RRT *
Это код планирования пути с RRT *
Черные кружки — препятствия, зеленая линия — дерево поиска, красные кресты — стартовая и голевая позиции.
Ссылка:
RRT * с тростниковой дорожкой
)
Планирование пути для автомобильного робота с RRT * и планировщиком пути Shepp.
LQR-RRT *
Это моделирование планирования пути с помощью LQR-RRT *.
Модель движения с двойным интегратором используется для локального планировщика LQR.
Ссылка:
Планирование квинтичных многочленов
Планирование движения с пятью полиномами.
Он может рассчитывать двумерный профиль траектории, скорости и ускорения на основе полиномов пятого порядка.
Ссылка:
Ридс Шепп планирует
Пример кода с планированием пути Ридс Шепп.
Ссылка:
Планирование пути на основе LQR
Пример кода, использующего планирование пути на основе LQR для модели двойного интегратора.
Оптимальная траектория в рамке Frenet
Это оптимальная траектория генерации в Frenet Frame.
Голубая линия — это целевой курс, а черные кресты — препятствия.
Красная линия — это прогнозируемый путь.
Ссылка:
перейти к управлению позой
Это имитация перехода к управлению позой
Ссылка:
Контроль Стэнли
Моделирование траектории с помощью рулевого управления Stanley и ПИД-регулятора скорости.
Ссылка:
Управление обратной связью заднего колеса
Моделирование траектории с помощью рулевого управления с обратной связью задних колес и ПИД-регулирования.
Ссылка:
Линейно-квадратичный регулятор (LQR) скорости и рулевого управления
Имитация слежения за траекторией с контролем скорости LQR и рулевого управления.
Ссылка:
Модель прогнозируемой скорости и рулевого управления
Моделирование траектории с итеративной линейной моделью, предсказывающей скорость и управление рулевым управлением.
Ссылка:
Управление прогнозированием нелинейной модели с помощью C-GMRES
Планирование движения и моделирование отслеживания пути с помощью NMPC C-GMRES
Ссылка:
N шарнирное соединение рычага к точке управления
N шарнирный рычаг для моделирования управления точкой.
Это интерактивное моделирование.
Вы можете установить конечное положение конечного эффектора, щелкнув левой кнопкой мыши в области построения.
Однако в этом моделировании N = 10 можно изменить.
Постановка навигации с обходом препятствий
Включите навигацию с имитацией уклонения от препятствий.
3D траектория дрона после
Это трехмерная траектория после моделирования квадрокоптера.
Посадка с ракетным двигателем
Это трехмерное моделирование траектории посадки с ракетным двигателем.
Ссылка:
Планировщик двуногий с перевернутым маятником
Это двуногий планировщик для изменения шагов для перевернутого маятника.
Вы можете установить шаги, и планировщик изменит их автоматически.
MIT
Если этот проект помогает вашему проекту робототехники, сообщите мне, создав проблему.
Мы приветствуем видео вашего робота, использующего PythonRobotics !!
Это список комментариев и ссылок других пользователей: users_comments
Любой вклад приветствуется !!
Если вы используете код этого проекта для своей академической работы, мы рекомендуем вам цитировать наши статьи
Если вы используете код этого проекта в промышленности, мы также будем рады получить известие от вас; не стесняйтесь обращаться к разработчикам напрямую.